





















Alle producten
-
Multifunktioneel handheld infrarood nachtzicht
-
Robot voor het verwijderen van explosieven
-
Miniatuur verkenningsrobot
-
Digitaal nachtzicht met een enkel oog
-
Digitaal nachtzichtapparaat
-
Anti-sniper
-
Draagbare radar
-
Patrouille opname zaklamp
-
Tactische uitrusting voor speciale operaties
-
Geweerwerkingsgebied
-
Laserafstandsmeter
-
Militair model
-
tactische uitrusting
-
Opblaasbare lokaasjes
Lichte explosieven ontmanteling EOD robots Hound-I






| Plaats van herkomst | China |
|---|---|
| Merknaam | Particle |
| Modelnummer | REOD400 |
| Prijs | $102,881 |
| Betalingscondities | T/T |

Contacteer me voor vrije steekproeven en coupons.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Als u om het even welke zorg hebt, verstrekken wij de online-Help van 24 uur.
xProductdetails
| grootte | ≤ 830 mm × 600 mm × 460 mm (volledig opgeborgen) | Gewicht | ≤ 37 kg ((Bevat twee sets batterijen) |
|---|---|---|---|
| Over de belemmeringsbekwaamheid heen | ≥300mm | Over de groefbreedte | ≥400MM |
| Gradeerbaarheid | ≥45° | Trappen beklimmen | ≥45° |
| Bewegbare gewrichten | 8 | Verste vangafstand | ≥ 1650 mm |
| Maximale openingsbreedte van de greep | ≥160mm | Liftcapaciteit | 6-16 kg |
| Operatiemethode | Dual-mode werking van knop rocker en touchscreen | Controlemethode | Kabelbesturing ≥100m ((Standaardkabel),draadloze besturing ≥1000m ((buiten) |
| Batterijduur ((normale temperatuur) | ≥2H | IP-klasse | IP66 |
| Markeren | Hound-I eod robots,Robots voor het verwijderen van explosieven,Lichte robot-eod |
||
Productomschrijving
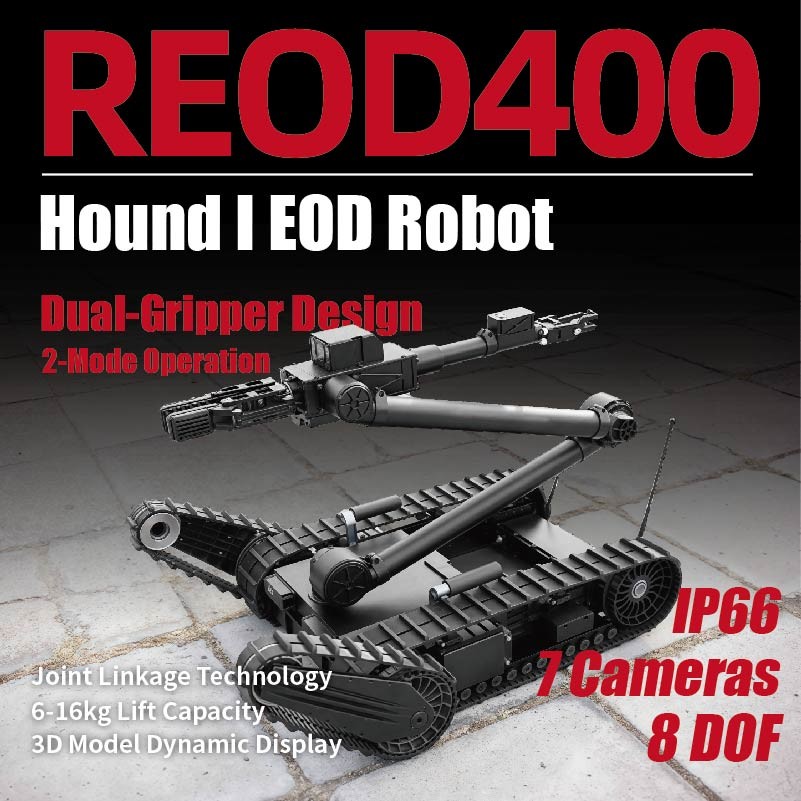
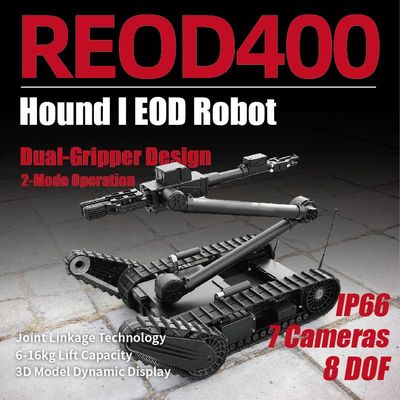
EOD-robot voor het verwijderen van lichtgewicht explosieve munitie Hound-I
Beschrijving en kenmerken
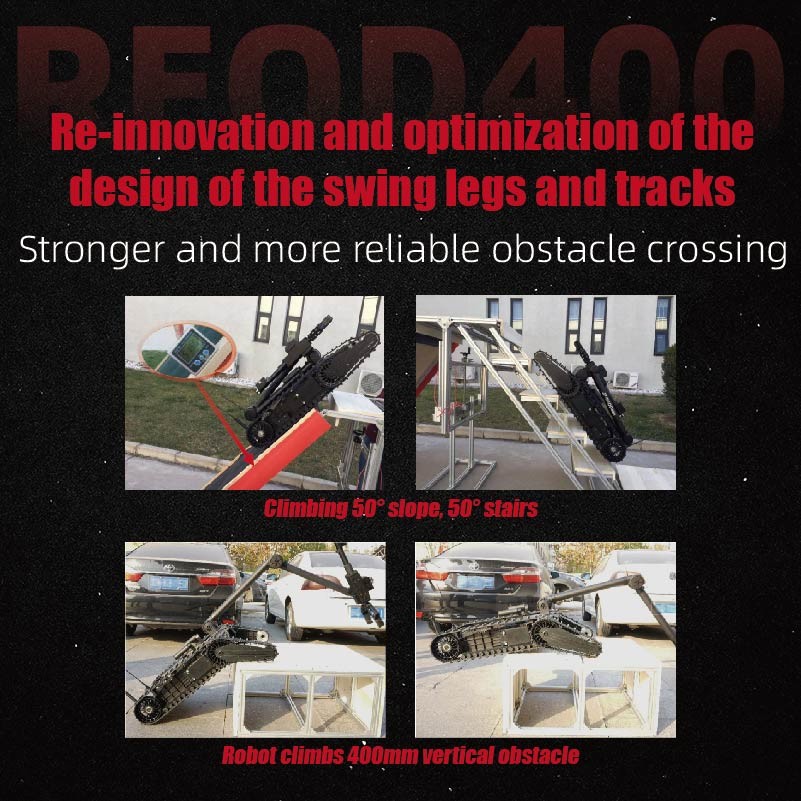
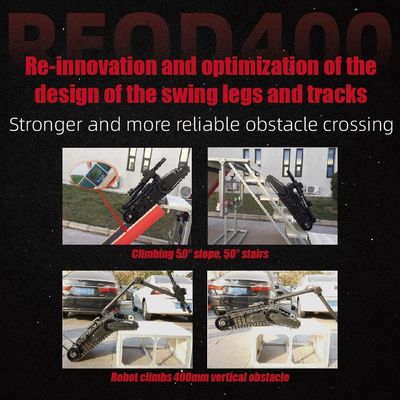
De REOD400 EOD-robot is een geavanceerde oplossing voor de verwijdering van explosieve munitie in risicovolle omgevingen.Dit maakt het zeer efficiënt voor operaties zoals stedelijk anti-terrorisme.De robot is compact en lichtgewicht, met afmetingen van ≤830 mm × 600 mm × 460 mm (volledig opgeborgen) en een gewicht van ≤37 kg.Het heeft een maximaal toerental van ≥ 1.8m/s met 5 versnellingen en een continue variabele aandrijving, een hindernisvrijheid van ≥ 300 mm en een trap- en trapklimvermogen tot 45°,het garanderen van superieure manoeuvrabiliteit en aanpassingsvermogen in verschillende terreinen.
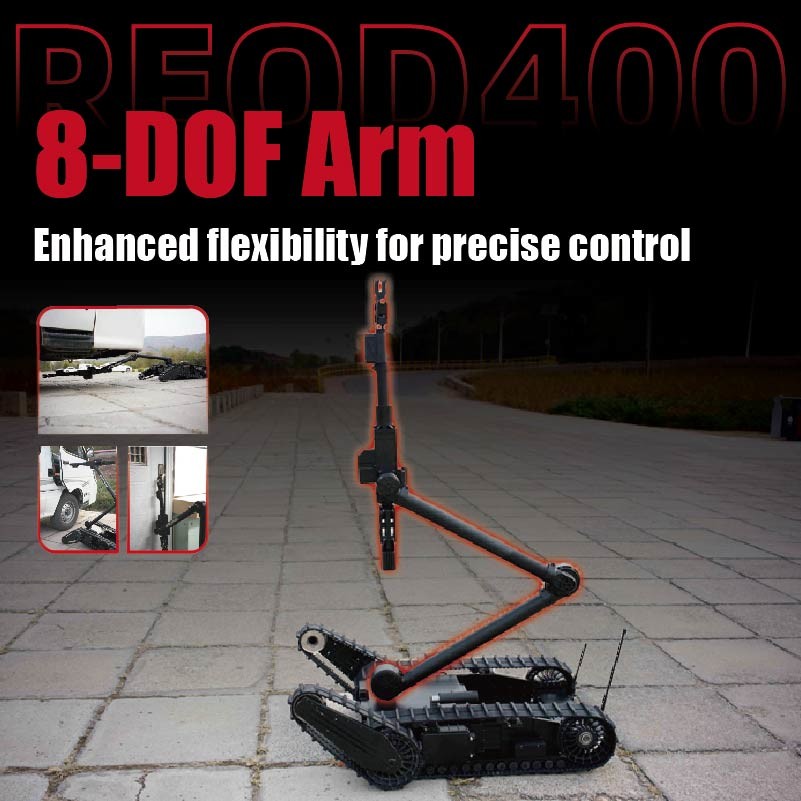
Uitgerust met een 8-graden vrijheidManipulator, biedt de REOD400 een nauwkeurige bediening met een maximale greephoogte van ≥ 1700 mm (hoofdklauw) en een maximale greepafstand van ≥ 1380 mm (hoofdklauw).het mogelijk maken van een rijkere waarnemingsperspectiefMet een batterijduur van ≥ 2 uur bij normale temperatuur, een IP66-classificatie voor stof- en waterbestendigheid,en besturingsmethoden, met inbegrip van kabelbesturing tot 100 m en draadloze besturing tot 1000 mDe REOD400 is gebouwd voor betrouwbaarheid en veelzijdigheid in uitdagende omstandigheden.
Innovatief ontwerp voor een "dubbele greep" Verbetering van de flexibiliteit en haalbaarheid bij de uitvoering van taken
Het innovatieve "Dual Gripper"-ontwerp is voorzien van een robotarm die is uitgerust met zowel een "primaire greepklauw" als een "multifunctionele verlengklauw".Dit ontwerp vergroot de flexibiliteit en haalbaarheid van de robot bij het uitvoeren van taken, die een doeltreffende ondersteuning biedt voor het uitvoeren van een verscheidenheid aan taken in één operatie.Het ontwerp van de "Dual Gripper" maakt effectief gebruik van de beperkingen van traditionele robots voor het verwijderen van bommen die slechts een "eenvoudige gripper" hebben," die niet tegelijkertijd taken kan uitvoeren zoals "gevaarlijke voorwerpen grijpen" en "deuren openen, snijden, vastklampen, afsnijden, hakken en andere hulpmaatregelen".Het kan taken uitvoeren zoals "een deur openen en een voorwerp in één keer grijpen".. "
Het ontwerp van de "Dual Gripper" bevrijdt de "primary gripping claw" van het uitvoeren van andere functies dan het grijpen, waardoor de gripcapaciteit van de robot aanzienlijk wordt verbeterd.De primaire klauw kan verdachte gevaarlijke voorwerpen van 6 tot 16 kg vangen., met een greepbreedte van maximaal 160 mm en een maximale klemkracht van 300 N. Bovendien, afhankelijk van de specifieke operationele taken,de "gripper tool set" kan snel worden vervangen om verschillende soorten en vormen van gevaarlijke voorwerpen te hanteren.
Ondersteuning Touch / Joystick Control Meer gebruikersvriendelijke interactie en betrouwbare bediening
Het grafische touch/joystick besturingsactiviteitsontwerp is momenteel een toonaangevende oplossing voor de besturing van bomverwijderende robots op internationaal niveau.Het is zeer erkend door de gebruikers voor zijn meer gebruiksvriendelijke interactie en betrouwbare werkingDe belangrijkste kenmerken zijn als volgt:
- Grafisch ontwerp van de werking:Alle bewerkingen zijn grafisch ontworpen, waardoor gebruikers geen complexe knopfuncties en besturingsprotocollen hoeven te onthouden.Deze gebruiksvriendelijke interface maakt de bediening eenvoudig en intuïtief, waardoor de trainingstijd aanzienlijk wordt verkort.
- Touch / joystick besturing Operatieontwerp:Zowel joystickknoppen als een touchscreen kunnen worden gebruikt om alle bewerkingen van de robot uit te voeren.De redundantie die door deze twee werkmethoden wordt geboden, verhoogt niet alleen de betrouwbaarheid van het systeem, maar verbetert ook de operationele efficiëntie door joystickknoppen te combineren met aanraakschermbesturing.
|
|
Remote 3D real-time display dichtbij, intuïtievere bediening
Aangezien bomverwijderende robots vaak buiten de gezichtslijn opereren tijdens missies, is realtime informatie over de hoeken en ruimtelijke posities van de gewrichten van de robot cruciaal voor de bedieners. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusDit zorgt ervoor dat de robot zich "bij de hand" voelt, zelfs als hij "ver weg" is, waardoor een intuïtievere bediening mogelijk is.
De belangrijkste kenmerken van het afstandsbedieningstoestel zijn als volgt:
- Realtime weergave van de 3D-status van de robot
- Bewaking van de 3D-status van de robot vanuit verschillende hoeken
- In- en uitzoomen van de 3D-status van de robot
De handheldcontroller van de robot reproduceert de 3D-status van de robot op afstand, waardoor het 3D-model kan worden vergroot, vergroot en vanuit elke hoek kan worden bekeken.
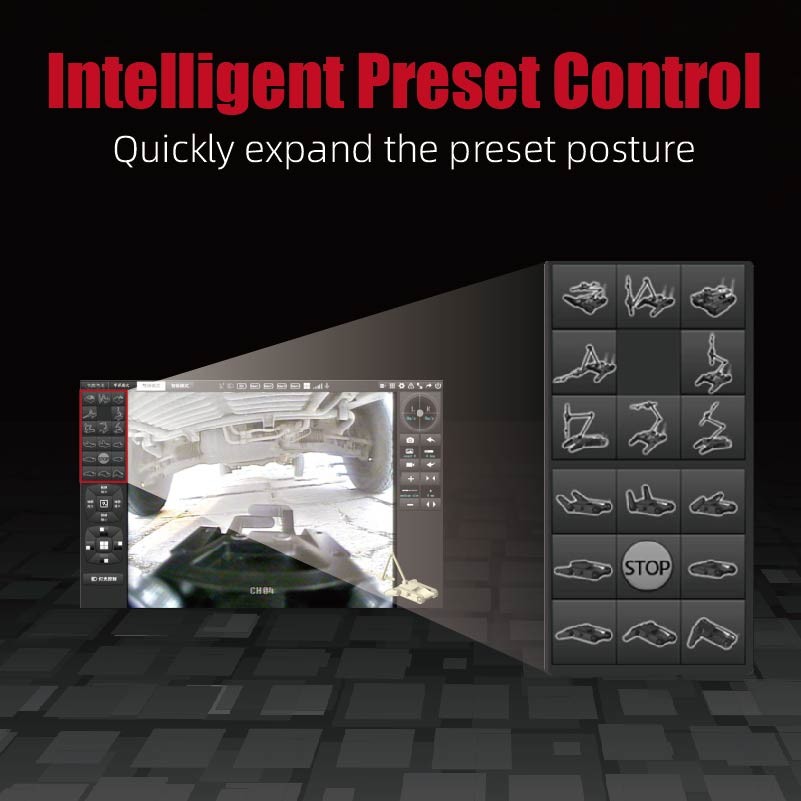
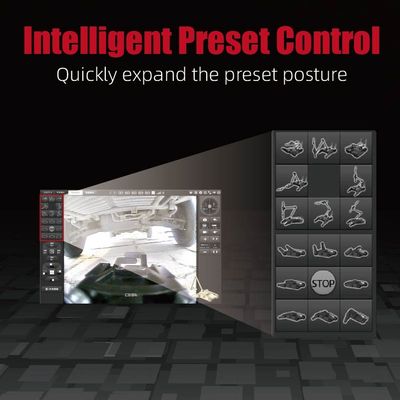
Intelligent ontwerp voor een vooraf ingestelde houdingsregeling
Met de "Intelligent Preset Posture Control for Common Tasks" kan de robot "automatisch met één klik een vooraf ingestelde positie bereiken" op basis van de behoeften van de gebruiker.Deze functie vermindert de hoeveelheid handmatige bediening op het terrein aanzienlijk, als effectieve assistent voor de frontlinie-operatoren en het verbeteren van de betrouwbaarheid en veiligheid van bomverwijderingswerkzaamheden.
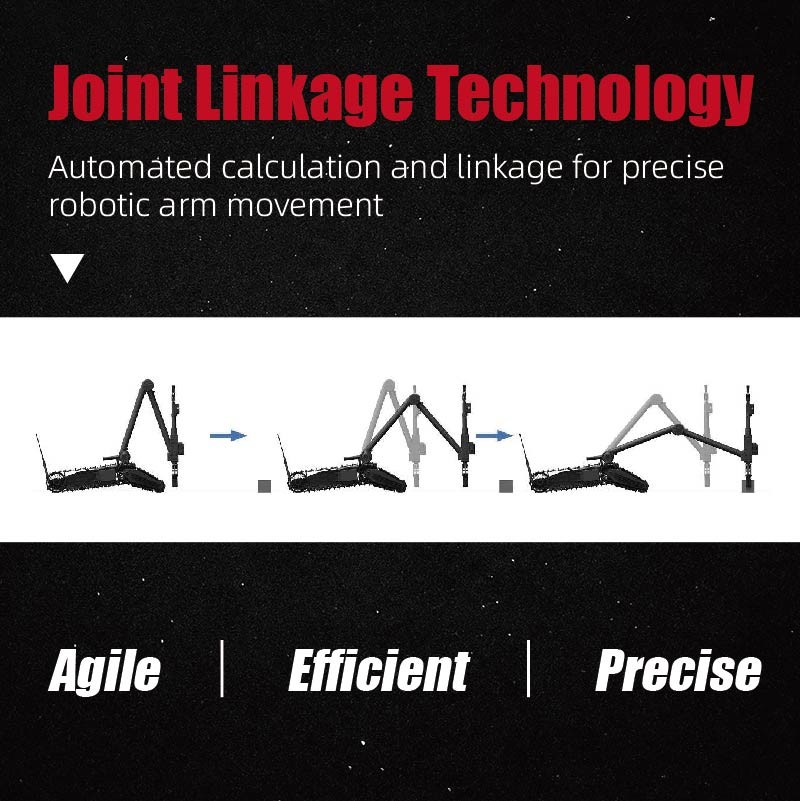
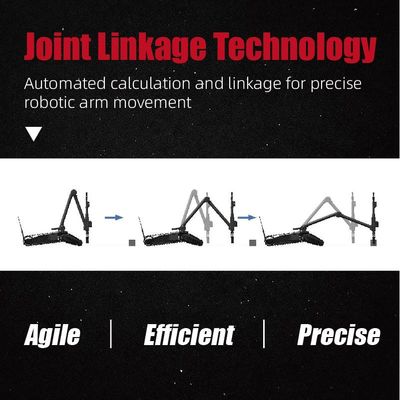
"X-Y-Z" verbindingstechnologie ∙ Preciezer en efficiënter besturen
Het ontwerp voor de werking van de verbindingstechnologie van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding van de verbinding,"transformeert de traditionele "single-joint" controle van bomverwijderende robots in "multi-joint gecoördineerde controle"Dit verbetert aanzienlijk de operationele efficiëntie en nauwkeurigheid van bomverwijderende robots. In vergelijking met het "single-joint" besturingsontwerp verkort het de gemiddelde bedrijfstijd met 80%.
De REOD400 realiseert "Cartesian coördinate-based gripper translation control" door middel van automatische berekening.het controleert snel de robot om "multi-gewricht gecoördineerde beweging" voor een-dimensionale ruimte gripper vertaling te bereikenDit vermindert de operationele moeilijkheden en verhoogt de nauwkeurigheid, waardoor bijna onmiddellijke positionering mogelijk is zonder dat herhaalde iteraties nodig zijn.
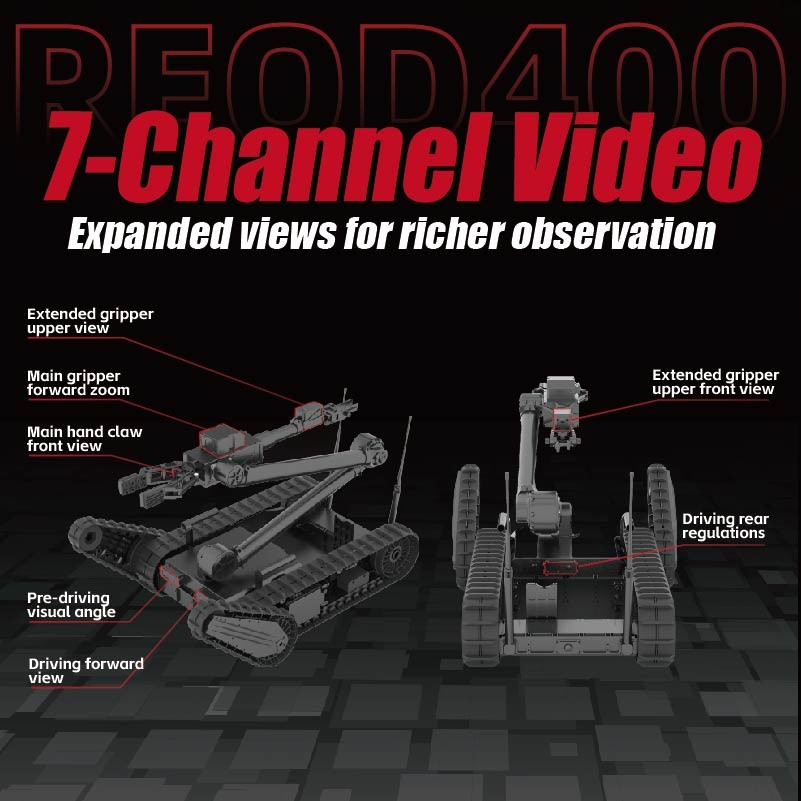
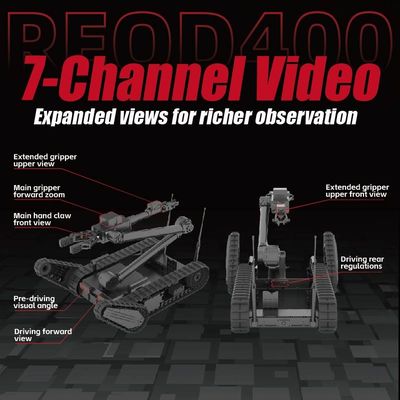
Mode-adaptief beeldsysteem Zeven camerabeelden voor een verbeterde waarneming
Het beeldsysteem van de robot fungeert als de ogen van de bediener.aanzienlijk verbeteren van het vermogen van de frontlinie-operatoren om afgelegen omgevingen te waarnemenHet ontwerp van het 7-camerasysteem is niet een eenvoudige opstelling, maar eerder een verbetering en optimalisatie op basis van problemen die gebruikers tijdens het daadwerkelijke gebruik tegenkomen.
Het beeldsysteem is over het algemeen verdeeld in drie beeldcombinaties: rijmodus, primaire grippermodus en uitgebreide grippermodus.Het schakelt automatisch tussen deze modi op basis van typische taken zoals rijden, grijpen en observeren, waardoor een sterker bewustzijn van de omgeving op afstand en een rijkere waaier van waarnemingshoeken wordt geboden.
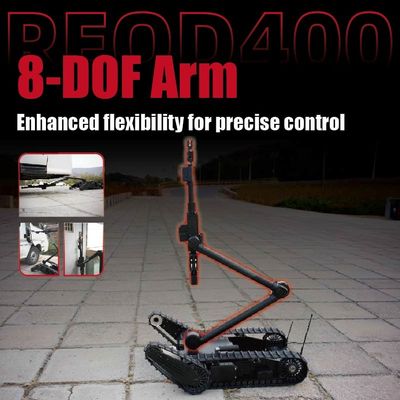
Geïntegreerde robotarm met acht vrijheidsgraden
De REOD400-robotarm heeft een geïntegreerd ontwerp met 8 graden vrijheid, wat zorgt voor sterke ruimtelijke bereikmogelijkheden.Dit ontwerp stelt de robotarm in staat niet alleen conventionele bomverwijderingswerkzaamheden uit te voeren, maar ook operaties die conventionele bomverwijderingsrobots met 5 of 6 graden vrijheid niet kunnen uitvoeren, zoals het grijpen van objecten in hoge, lage, diepe put of tafel omgevingen, evenals het uitvoeren van multi-hoek verkenning in hoge, lage en diepe put omgevingen.
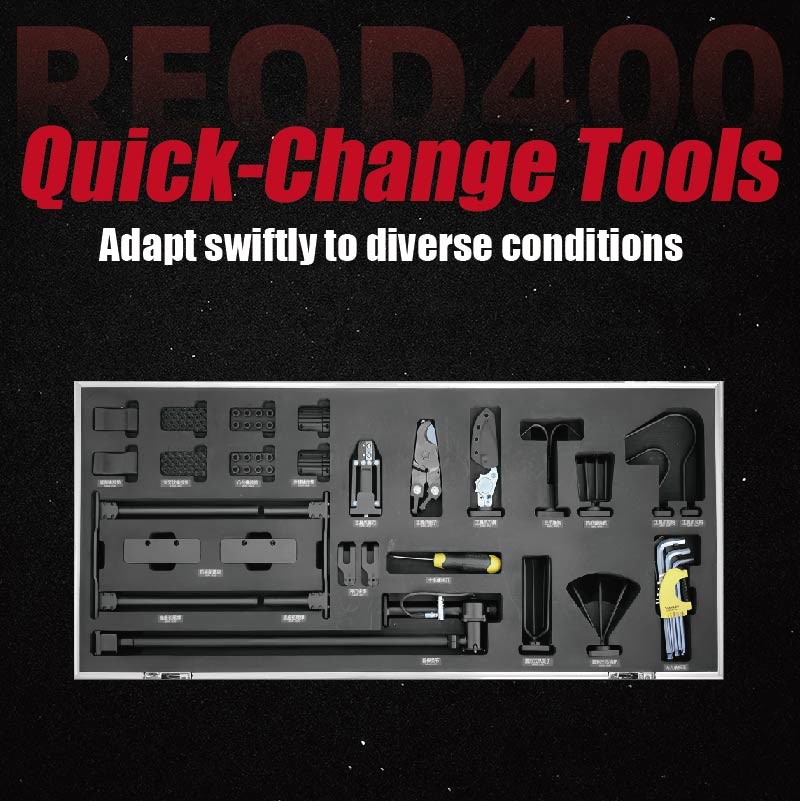
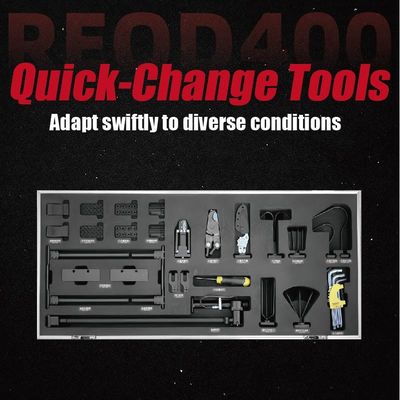
Een veelzijdig snel wisselend gereedschapssysteem
De REOD400-robot is uitgerust met 18 soorten "snel wisselgereedschap", waaronder 6 pakgereedschapssets, 6 basisgereedschapssets en 6 uitgebreide gereedschapssets,de "greeptool sets" snel kunnen worden vervangen op basis van verschillende operationele taken en de soorten en vormen van verschillende gevaarlijke voorwerpen, waardoor aan de uiteenlopende operationele behoeften van de gebruikers wordt voldaan.
Toepassingen
Afbeeldingsgalerij
Technische parameters
|
Robotplatform |
|
|
Grootte |
≤ 830 × 600 × 460 mm ((Volledig opgeborgen) |
|
Gewicht |
≤ 37 kg (Bevat twee sets batterijen) |
|
Maximale snelheid |
≥ 1,8 m/s ((5 versnellingen, continu variabel) |
|
Over de belemmeringsbekwaamheid heen |
≥300 mm |
|
Over de groefbreedte |
≥ 400 mm |
|
Groepeerbaarheid |
≥ 45° |
|
Trappen beklimmen |
≥ 45° |
|
Batterijduur ((normale temperatuur) |
≥ 2 uur |
|
IP-klasse |
IP66 |
|
Robotarm grijpen prestaties |
|
|
Uitgebreide staat |
≥ 6 kg |
|
Afgetreden staat |
≥ 16 kg |
|
Klauwen |
2 |
|
Bewegbare gewrichten |
8 |
|
Maximale waarnemingshoogte |
≥2400 mm |
|
Maximale greephoogte |
≥1700 mm(Hoofdklauw),≥2000 mm(- De vice-clawer.) |
|
Verste vangafstand |
≥1380 mm(Hoofdklauw),≥ 1650 mm(- De vice-clawer.) |
|
Maximale openingsbreedte van de greep |
≥160 mm |
|
Draagbare controller |
|
|
Grootte |
≤360 × 210 × 70 mm |
|
Gewicht |
≤ 2 kg ((zonder rugzak) |
|
Scherm weergeven |
10.1'' LCD |
|
Video-scherm |
7-kanaal |
|
Operatiemethode |
Dual-mode werking van de knopschakelaar en het touchscreen |
|
Controlemethode |
Kabelbesturing ≥100m ((Standaardkabel),draadloze besturing ≥1000m ((buiten) |
Neem contact met ons op
Mevrouw Amy.
E-mail:Amy-huang@mysmech.com
Geadviseerde Producten