





















Alle producten
-
Multifunktioneel handheld infrarood nachtzicht
-
Robot voor het verwijderen van explosieven
-
Miniatuur verkenningsrobot
-
Digitaal nachtzicht met een enkel oog
-
Digitaal nachtzichtapparaat
-
Anti-sniper
-
Draagbare radar
-
Patrouille opname zaklamp
-
Tactische uitrusting voor speciale operaties
-
Geweerwerkingsgebied
-
Laserafstandsmeter
-
Militair model
-
tactische uitrusting
-
Opblaasbare lokaasjes
X-Y-Z coördinatie-robotarm Middelgrote EOD-robot







| Plaats van herkomst | China |
|---|---|
| Merknaam | Particle |
| Modelnummer | REOD500 |
| Min. bestelaantal | 1 |
| Prijs | $205,761 |
| Betalingscondities | T/T |

Contacteer me voor vrije steekproeven en coupons.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Als u om het even welke zorg hebt, verstrekken wij de online-Help van 24 uur.
xProductdetails
| Maximale snelheid | ≥ 2m/s ((5 versnellingen, continu variabel) | Bijzondere kenmerken | Explosiebestendige, waterdichte, op afstand ontwapenende capaciteit |
|---|---|---|---|
| Productnaam | Doelstellingen van de missie Hound-III EOD-robot voor verwijderingsmaatregelen en gevaaroverdracht | Kenmerken | 1. krachtig mechanisch armontwerp, geeft krachtige krabbelprestaties;2. "Christie" ophangingssysteem |
| Gewicht van het robotplatform | ≤ 350 kg ((Inhoud batterijen); | Roboterplatform-watingdiepte | ≥ 500 mm; |
| Toepassingen | Reactie op geïmproviseerde explosieven | Grootte van het robotplatform | 1600×850×1300 mm ((Volledig opgeborgen); |
| Robotgrootte | ≤950×650×650mm ((Volledig opgeborgen) | Gewicht van de robot | ≤ 50 kg ((Bevat twee sets batterijen) |
| Over de belemmeringsbekwaamheid heen | ≥400MM | Over de groefbreedte | ≥400MM |
| Gradeerbaarheid | ≥45° | Trappen beklimmen | ≥45° |
| Watering diepte | ≥200mm | Batterijduur ((normale temperatuur) | ≥3h |
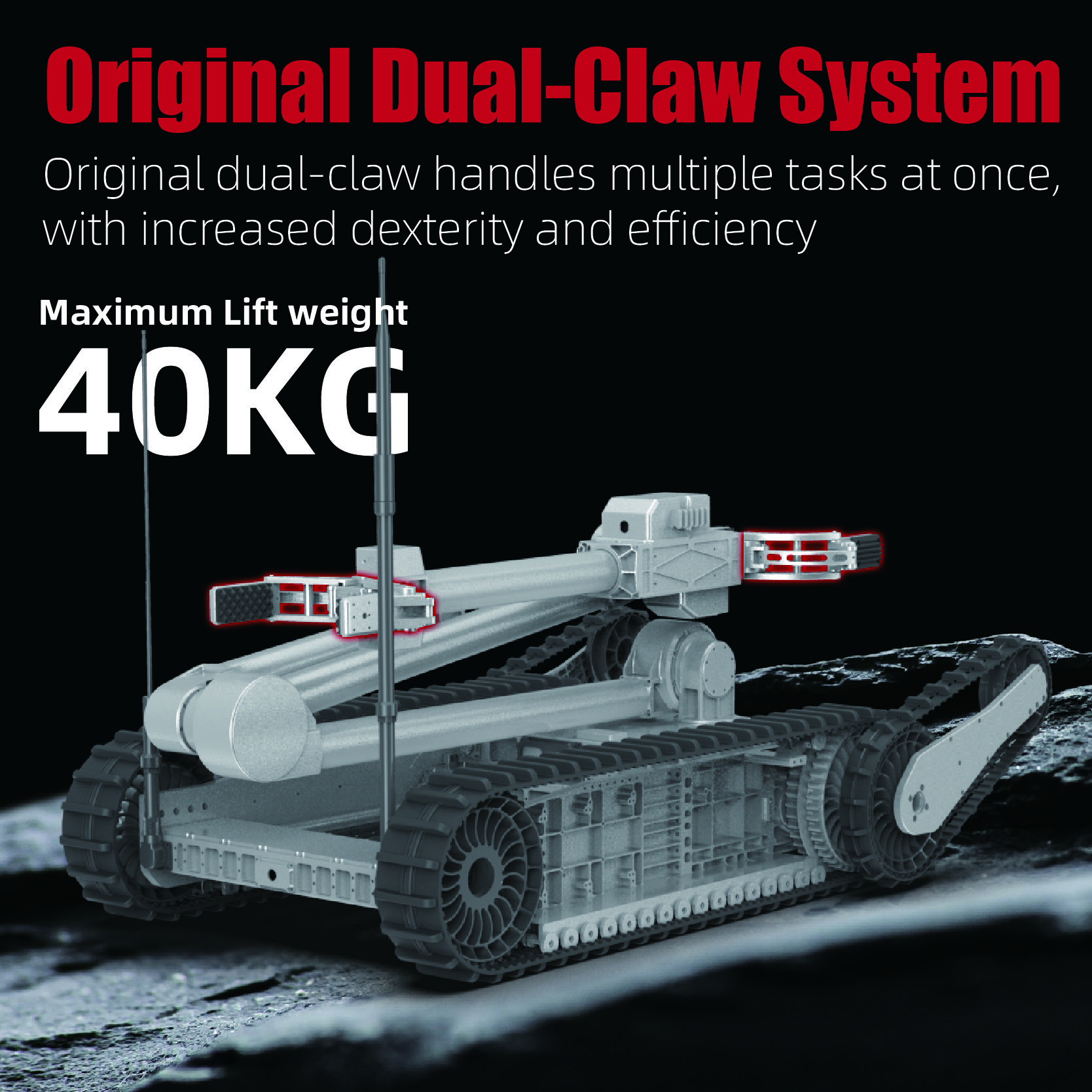
| Armlengte | 2000 mm | Maximaal gewicht | ≥ 40 kg |
| Klauwen | 2 | Bewegbare gewrichten | 8 |
| Controlemechanismegrootte | ≤ 270 mm × 170 mm × 100 mm | Controlemechanismegewicht | ≤ 1,2 kg ((zonder rugzak) |
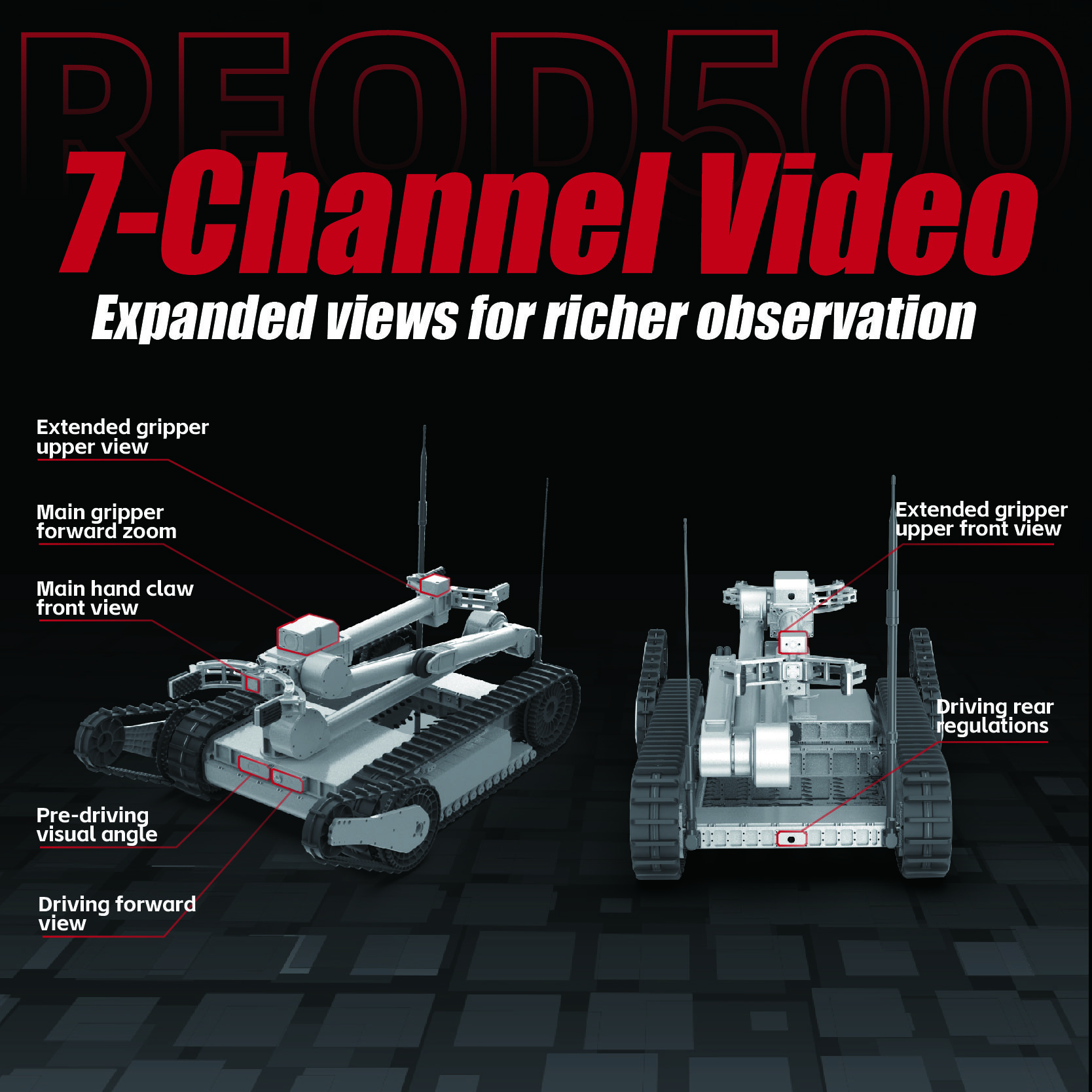
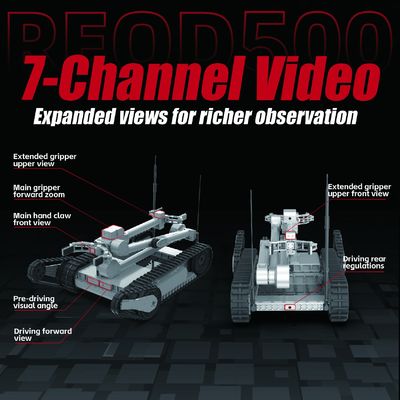
| Scherm van de controller | 7' LCD | Video-scherm | Zeven kanalen, waarvan er een met autofocus zoomfunctie. |
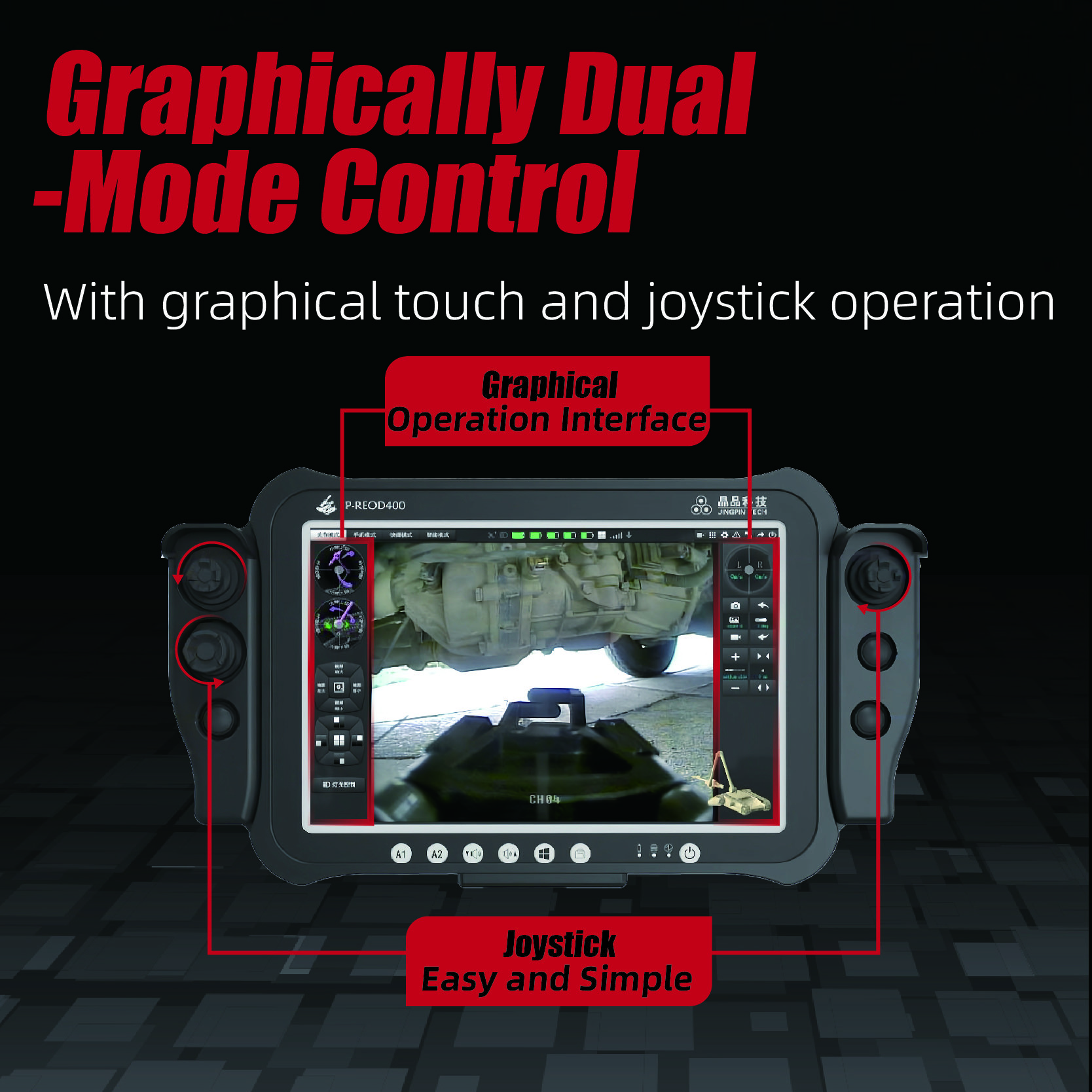
| Operatiemethode | Dual-mode werking van knop rocker en touchscreen | Controlemethode | Kabelbesturing ≥100m ((Standaardkabel),draadloze besturing ≥1000m ((buiten) |
| Robotplatform IP-klasse | IP66 | Arm IP-klasse | IP66 |
| Werktemperatuur | -40°C+50°C | Bergingstemperatuur | -45°C+60°C |
| Markeren | Coördinerende robotarm voor het verwijderen van explosieve munitie,Robot voor het verwijderen van middelgrote explosieven,IP66-robot-eod |
||
Productomschrijving
Geavanceerde X-Y-Z-coördinate robotarm Middelgrote EOD-robotfabrikanten
Beschrijving en kenmerken
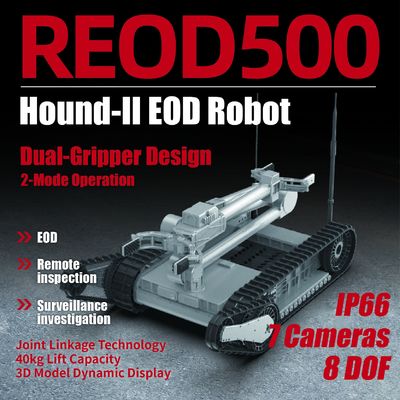
De JP REOD500 EOD-robot is een geavanceerde oplossing voor de verwijdering van explosieve munitie in risicovolle omgevingen.met een schommel-arm kruipen systeem dat de hoofdkruiper combineert met een schommel-arm obstakel mechanisme, verbetert dit ontwerp de obstakelnavigatiemogelijkheden van de robot aanzienlijk en zorgt voor een robuuste en betrouwbare prestatie bij EOD-operaties.De robot is uitgerust met een robotarm met meerdere vrijheidsgraden die krachtige grips- en hanteermogelijkheden biedt. De JP REOD500 heeft afmetingen van ≤900 mm × 650 mm × 500 mm (volledig opgeborgen) en een gewicht van ≤42 kg.met een hoog vermogen tot en met 45°, waardoor een superieure manoeuvreerbaarheid op verschillende terreinen wordt gewaarborgd.
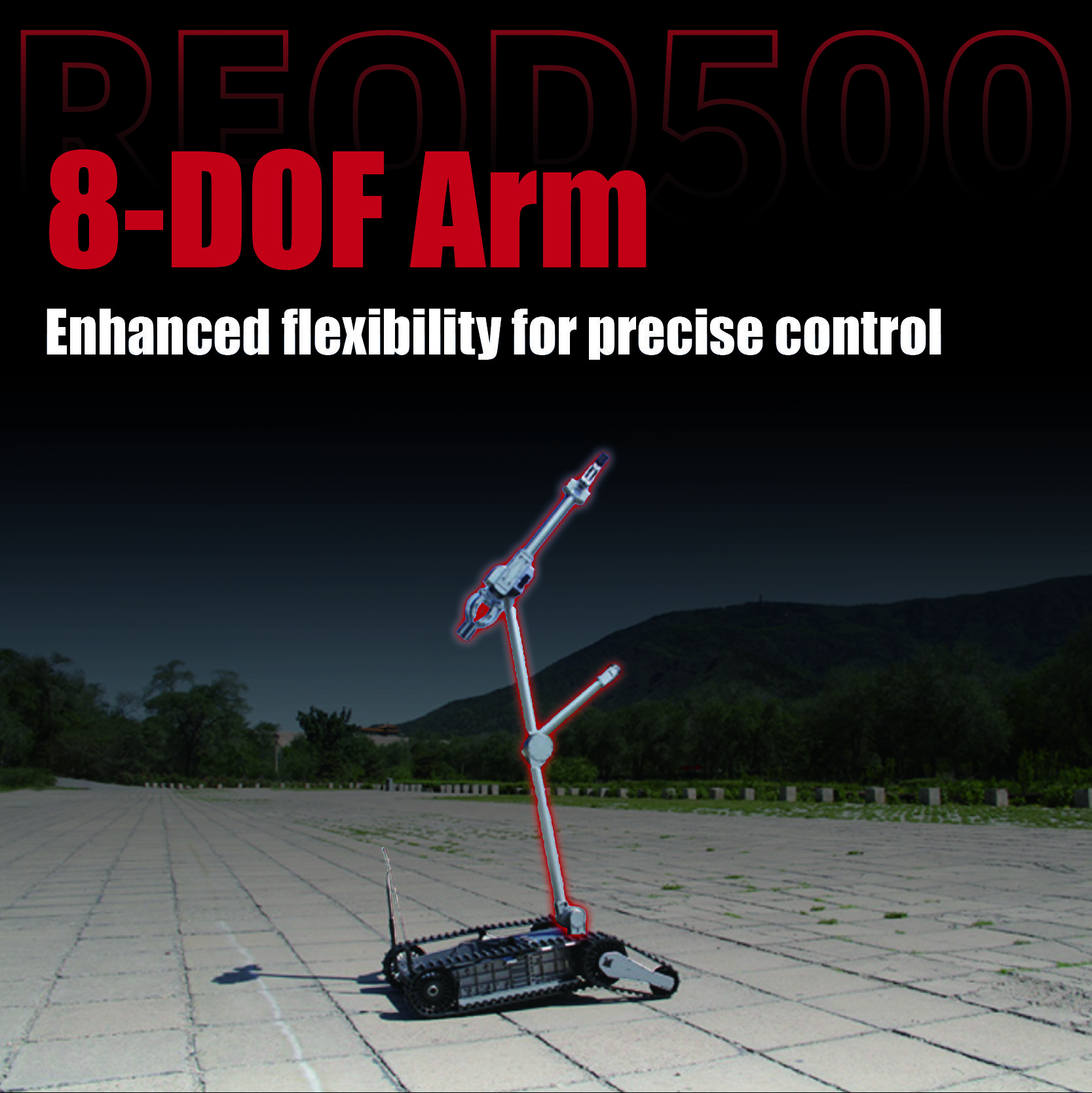
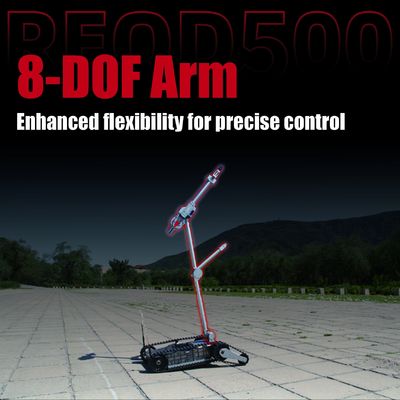
De JP REOD500 is uitgerust met een 8-graden vrijheidsmanipulator en biedt een precieze bediening met een maximale greephoogte van ≥1800 mm (hoofdklap) en een verste greepsafstand van ≥1400 mm (hoofdklap).De robot ondersteunt een 7-kanaals video display, die een rijkere waarnemingsperspectief mogelijk maakt, en beschikt over externe 3D-houding real-time weergave mogelijkheden.een IP67-classificatie voor stof- en waterbestendigheidDe JP REOD500 is gebouwd voor betrouwbaarheid en veelzijdigheid in uitdagende omstandigheden.het biedt OEM- en ODM-aanpassingsopties om aan specifieke operationele behoeften te voldoen.
Verbeterd mechanisch armontwerp
De JP REOD500 beschikt over een verbeterd mechanisch armontwerp dat zijn greepvermogen aanzienlijk verbetert.Dit geavanceerde ontwerp stelt de robot in staat om met grotere precisie en sterkte een verscheidenheid aan gevaarlijke voorwerpen te hanteren, waardoor de algehele efficiëntie van EOD-operaties wordt verbeterd.
Innovatief "twee klauwen"-patentontwerp
Het gepatenteerde ontwerp met twee klauwen stelt de JP REOD500 in staat meerdere taken tegelijkertijd op te lossen.zoals het vasthouden van voorwerpen tijdens het openen van deuren of het uitvoeren van andere hulptaken, waardoor het zeer effectief is voor EOD-missies.
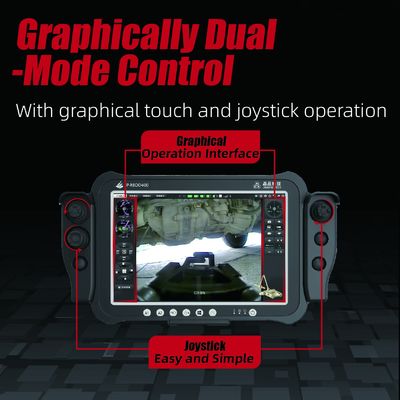
Grafisch dubbelmodus bedieningsomstandigheden
De grafische dual-mode werking biedt gebruikers een intuïtieve interface voor het bedienen van de robot.het gemak van gebruik en de betrouwbaarheid in omgevingen met hoge stress te garanderenDit ontwerp elimineert de noodzaak voor gebruikers om complexe knopfuncties te onthouden, waardoor de trainingstijd wordt verkort en de operationele efficiëntie wordt verbeterd.
Afstandsbediening 3D real-time display
De JP REOD500 maakt gebruik van geavanceerde 3D virtuele display technologie voor real-time feedback van de status van de robot.een intuïtief en gedetailleerd begrip van de positie en omgeving van de robot, zelfs wanneer het buiten de zichtlijn werkt.
Intelligente ingestelde besturingsontwerp
Het intelligente "voorgezette" besturingsontwerp maakt het mogelijk dat de JP REOD500 automatisch met één klik de voorgezette posities bereikt, op basis van de behoeften van de gebruiker.het verminderen van de hoeveelheid handmatige interventie en het garanderen van een snelle en betrouwbare uitvoering van de taak.
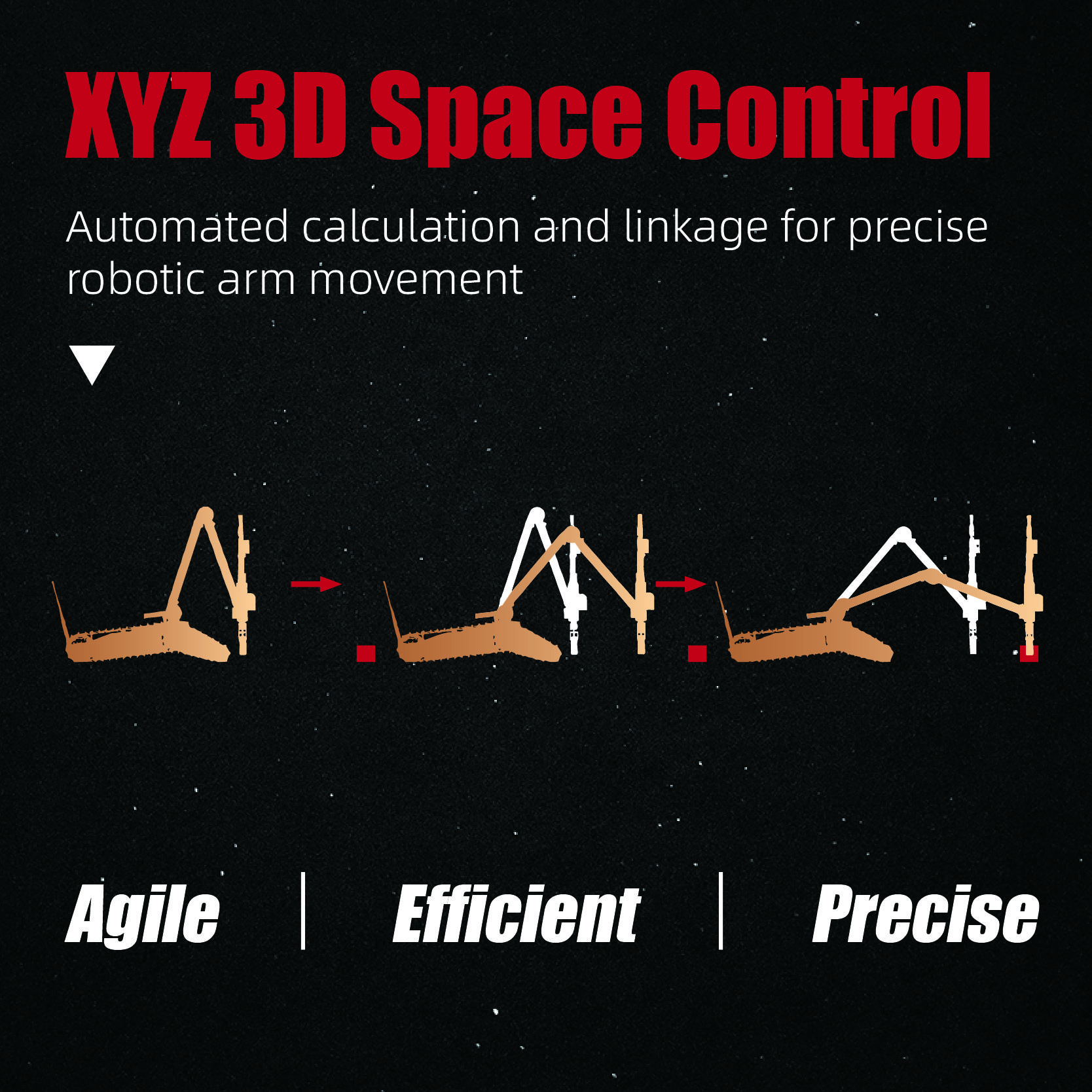
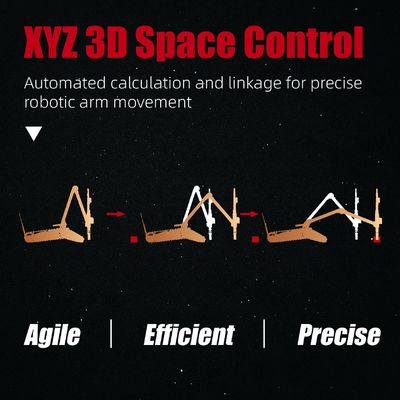
"X-Y-Z" Driedimensionale ruimte Robot Arm Linkage Design Precise Control
De JP REOD500 maakt gebruik van een "X-Y-Z" driedimensionaal robotarmverbindingsontwerp op basis van automatische berekeningen, waardoor nauwkeurige controle over de bewegingen van de robot mogelijk is.Dit ontwerp verbetert de efficiëntie en nauwkeurigheid van bomverwijderingen, waardoor de gemiddelde werktijd met maximaal 80% wordt verkort ten opzichte van de traditionele controle met één gewricht.
7-kanaals videosysteem met een rijker observatiesysteem
De JP REOD500 is uitgerust met een 7-kanaals video systeem en biedt meerdere waarnemingshoeken om het situatiekennis te vergroten.primaire gripmodus, en hulpgreepmodus, die zich aanpast aan de operationele context voor een optimaal zicht.
8-graden vrijheid Robotarmontwerp
Het ontwerp van de 8-graden vrijheidsrobotarm geeft de JP REOD500 sterke ruimtelijke bereikmogelijkheden, waardoor het taken kan uitvoeren in hoge, lage, diepe put of tafelomgevingen.Deze flexibiliteit maakt het geschikt voor een breed scala van EOD-operaties die precisie en aanpasbaarheid vereisen.
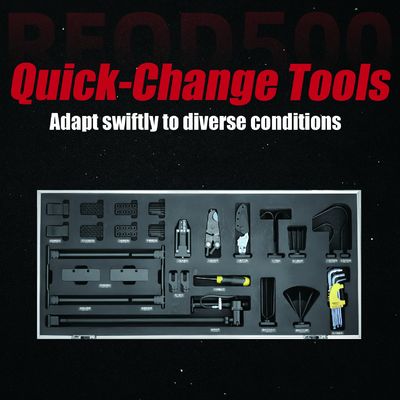
Verscheiden snel wisselend gereedschapssysteem ∙ Aanpasbaar aan verschillende arbeidsomstandigheden
De JP REOD500 is uitgerust met een veelzijdig snel wisselend gereedschapssysteem, inclusief meerdere greepgereedschapssets, basisgereedschapssets en uitgebreide gereedschapssets.Deze instrumenten kunnen snel worden vervangen op basis van de specifieke operationele vereisten, waardoor de robot zich naadloos kan aanpassen aan verschillende werkomstandigheden en effectief kan omgaan met verschillende soorten gevaren.
Toepassingen
Afbeeldingsgalerij
Technische parameters
| Robotplatform | |
|
Grootte |
≤950×650×650mm ((Volledig opgeborgen) |
|
Gewicht |
≤ 50 kg ((Bevat twee sets batterijen) |
|
Maximale snelheid |
≥ 2m/s ((5 versnellingen, continu variabel) |
|
Over de belemmeringsbekwaamheid heen |
≥ 400 mm |
|
Over de groefbreedte |
≥ 400 mm |
|
Gradeerbaarheid |
≥ 45° |
|
Trappen beklimmen |
≥ 45° |
|
Watering diepte |
≥ 200 mm |
|
Batterijduur ((normale temperatuur) |
≥ 3 uur |
|
Robotarm grijpen prestaties |
|
|
Armlengte |
2000 mm |
|
Maximaal gewicht |
≥ 40 kg |
|
Klauwen |
2 |
|
Bewegbare gewrichten |
8 |
|
Draagbare controller |
|
|
Grootte |
≤ 270 mm × 170 mm × 100 mm |
|
Gewicht |
≤ 1,2 kg ((zonder rugzak) |
|
Scherm weergeven |
7' LCD |
|
Video-scherm |
Zeven kanalen, waarvan er een met autofocus zoom functie. |
|
Operatiemethode |
Dual-mode werking van de knopschakelaar en het touchscreen |
|
Controlemethode |
Kabelbesturing ≥100m ((Standaardkabel),draadloze besturing ≥1000m ((buiten) |
|
Beschermingsniveau en aanpassingsvermogen voor het milieu |
|
|
Robotplatform |
IP66 |
|
Arm |
IP66 |
|
Werktemperatuur |
-40°C+50°C |
|
Bergingstemperatuur |
-45°C+60°C |
Neem contact met ons op
Mevrouw Amy.
E-mail:Amy-huang@mysmech.com
Geadviseerde Producten